PyTorch场景精度数据采集
简介
msProbe工具通过在训练脚本中添加PrecisionDebugger接口并启动训练的方式,采集模型在运行过程中的精度数据。
功能特点
多粒度数据采集:支持L0(模块级)、L1(API级)以及mix(L0+L1)的不同粒度的数据采集
多种dump模式:提供statistics、tensor、acc_check、structure、overflow_check、nan_check等多种采集模式
灵活的配置选项:通过config.json文件可以精确控制采集范围
使用前准备
环境准备
安装msProbe工具,详情请参见《msProbe安装指南》。
约束
仅支持PyTorch框架,暂不支持PyTorch2.7及以上版本的dynamo场景。
因PyTorch框架自动微分机制的限制,dump数据中可能会缺少原地操作模块/API及其上一个模块/API的反向数据。
使用msProbe工具后loss/gnorm发生变化:可能是工具中的item操作引入同步,PyTorch框架的hook机制等原因导致的,详见《FAQ》中模型计算结果改变原因分析。
快速入门
以下通过一个简单的示例,展示如何在PyTorch模型中使用msProbe工具进行精度数据采集。这个示例定义了一个nn.Module类型的简单网络,使用原型函数PrecisionDebugger进行数据采集,插入代码如下高亮显示。
import torch
import torch.nn as nn
import torch.nn.functional as F
+# 导入工具的数据采集接口
+from msprobe.pytorch import PrecisionDebugger, seed_all
+
+# 在模型训练开始前固定随机性
+seed_all()
+# 在模型训练开始前实例化PrecisionDebugger
+debugger = PrecisionDebugger(config_path="./config.json")
# 定义网络
class ModuleOP(nn.Module):
def __init__(self) -> None:
super().__init__()
self.linear = nn.Linear(in_features=8, out_features=4)
def forward(self, x):
x1 = self.linear(x)
r1 = F.relu(x1)
return r1
if __name__ == "__main__":
model = ModuleOP()
+ debugger.start(model=model) # 开启数据dump
x = torch.randn(10, 8)
out = model(x)
loss = out.sum()
loss.backward()
+ debugger.stop() # 关闭数据dump,可继续开启数据dump,采集数据会记录在同一个step中
+ debugger.step() # 结束数据dump,若继续开启数据dump,采集数据将记录在下一个step中
其中config.json文件为精度数据采集的配置文件,需要自行创建,详细说明请参见config.json介绍。下面是一个简单的config.json文件示例:
{
"task": "statistics",
"dump_path": "/home/data_dump",
"rank": [],
"step": [],
"level": "L1",
"async_dump": false,
"extra_info": true,
"statistics": {
"scope": [],
"list": [],
"tensor_list": [],
"data_mode": ["all"],
"summary_mode": "statistics"
}
}
数据采集功能介绍
功能说明
根据需求选择合适的功能(task)类型,task配置项详细说明请参见config.json介绍。
调试需求 |
推荐配置 |
特点 |
|---|---|---|
初步精度分析 |
task=“statistics” |
资源占用低,快速获取统计信息 |
深度精度分析 |
task=“tensor” |
采集完整数据,支持详细分析 |
确定性问题分析 |
task=“statistics” |
采集统计信息和tensor的CRC-32校验值,快速分析确定性问题 |
轻量确定性差异定位 |
task=“statistics” |
仅采集XOR校验值;如需加速采集,可安装编译时包含 |
NaN/Inf检测 |
task=“nan_check” |
通过寄存器状态检测API运行中的NaN/Inf |
使用示例
dump采集基础示例
dump采集基础示例如下,示例代码中的高亮显示为需要在用户脚本中添加的代码。
单击展开示例
+# 导入工具数据采集接口,尽量在迭代训练文件导包后的位置执行seed_all和实例化PrecisionDebugger
+from msprobe.pytorch import seed_all, PrecisionDebugger
+# 在模型训练开始前固定随机性
+seed_all()
+# PrecisionDebugger实例化,加载dump配置文件
+debugger = PrecisionDebugger(config_path="./config.json")
# 模型、损失函数的定义及初始化等操作
# ...
# 数据集迭代的位置一般为模型训练开始的位置
for data, label in data_loader:
+ debugger.start(model) # 开启数据dump
# 如下是模型每个step执行的逻辑
output = model(data)
# ...
# 计算梯度
loss.backward()
# 更新参数
optimizer.step()
+ debugger.stop() # 关闭数据dump,可继续开启数据dump,采集数据会记录在同一个step中
+ debugger.step() # 结束数据dump,若继续开启数据dump,采集数据将记录在下一个step中
示例接口介绍:
seed_all:用于固定网络中的随机性和开启确定性计算。
PrecisionDebugger:通过加载dump配置文件的方式来确定dump操作的详细配置。
start:启动精度数据采集。
stop:停止精度数据采集。
step:结束一个step的数据采集,完成所有数据落盘并更新dump参数。
更多接口介绍请参见接口介绍章节。
注意事项
PrecisionDebugger提供 dump 动态启停能力,通过配置文件中的dump_enable字段进行控制:在同一训练/推理任务中可按需动态开启或关闭 dump。详细说明请参见 config.json介绍 中的dump_enable参数说明。本工具提供固定的 API 支持列表,若需要删除或增加 dump 的 API,可以在 support_wrap_ops.yaml 文件内手动修改,如下示例:
functional: # functional为算子类别,找到对应的类别,在该类别下按照下列格式删除或添加API - conv1d - conv2d - conv3d
删除API的场景:部分模型代码逻辑会存在API原生类型校验,工具执行dump操作时,对模型的API封装可能与模型的原生API类型不一致,此时可能引发校验失败,详见《FAQ》中“异常情况”的第10条。
如果需要采集自定义API的精度数据,需要先向工具注册该API,注册方式请参见批量注册用户自定义的API或register_custom_api。
对于本工具支持 dump 的 API(参见 support_wrap_ops.yaml 文件),支持对 API 输入或输出配置忽略规则进行过滤,具体操作请参见API输入输出过滤。
采集函数模块化数据
采集函数模块化数据示例如下,示例代码中的高亮显示为需要在用户脚本中添加的代码。
单击展开示例
# 根据需要import包
import torch
import torch.nn as nn
import torch.nn.functional as F
+# 导入工具的数据采集接口
+from msprobe.pytorch import PrecisionDebugger, module_dump, module_dump_end
+# 在模型训练开始前实例化PrecisionDebugger
+debugger = PrecisionDebugger(config_path='./config.json')
# 定义网络
class ModuleOP(nn.Module):
def __init__(self) -> None:
super().__init__()
self.linear_1 = nn.Linear(in_features=8, out_features=4)
self.linear_2 = nn.Linear(in_features=4, out_features=2)
def forward(self, x):
x1 = self.linear_1(x)
x2 = self.linear_2(x1)
r1 = F.relu(x2)
return r1
if __name__ == "__main__":
module = ModuleOP()
+ debugger.start() # 开启数据dump
x = torch.randn(10, 8)
# ... # start和module_dump接口之间的数据正常dump
+ module_dump(module, "MyModuleOP") # 开启模块级精度数据dump
out = module(x) # module内部的child modules或API将不会被dump
+ module_dump_end() # 关闭模块级精度数据dump
loss = out.sum() # module_dump_end和stop接口之间的数据正常dump
loss.backward()
+ debugger.stop() # 关闭数据dump,可继续开启数据dump,采集数据会记录在同一个step中
+ debugger.step() # 结束数据dump,若继续开启数据dump,采集数据将记录在下一个step中
跨文件采集数据
跨文件采集数据示例如下,示例代码中的高亮显示为需要在用户脚本中添加的代码。
单击展开示例
为了确保所有API都被工具封装,PrecisionDebugger的实例化通常放在训练工程的入口位置,但有的时候,模型定义会在另一个文件中。
假设有两个文件,train.py(训练工程入口文件)和module.py(模型定义文件),为了采集module.py中定义的ModuleOP模块中某些子模块或API的前反向数据,需要在train.py和module.py文件中分别导入PrecisionDebugger并进行如下配置。
train.py文件:
# 根据需要import包
import torch
from module import ModuleOP
+# 导入工具的数据采集接口
+from msprobe.pytorch import PrecisionDebugger
+# 将PrecisionDebugger的实例化放在文件的开始位置,即导包后的位置,确保所有API都被封装
+debugger = PrecisionDebugger(config_path='./config.json')
if __name__ == "__main__":
module = ModuleOP()
x = torch.randn(10, 8)
out = module(x)
loss = out.sum()
loss.backward()
module.py文件:
import torch
import torch.nn as nn
import torch.nn.functional as F
+from msprobe.pytorch import PrecisionDebugger
# 定义网络
class ModuleOP(nn.Module):
def __init__(self) -> None:
super().__init__()
self.linear_1 = nn.Linear(in_features=8, out_features=4)
self.linear_2 = nn.Linear(in_features=4, out_features=2)
def forward(self, x):
+ PrecisionDebugger.start()
x1 = self.linear_1(x)
+ PrecisionDebugger.stop()
x2 = self.linear_2(x1)
r1 = F.relu(x2)
return r1
推理模型采集指定token_range
推理模型采集指定token_range示例如下,示例代码中的高亮显示为需要在用户脚本中添加的代码。
单击展开示例
from vllm import LLM, SamplingParams
+from msprobe.pytorch import PrecisionDebugger, seed_all
+# 在模型训练开始前固定随机性
+seed_all()
+# 请勿将PrecisionDebugger的初始化流程插入到循环代码中
+debugger = PrecisionDebugger(config_path="./config.json", dump_path="./dump_path")
# 模型定义及初始化等操作
prompts = ["Hello, my name is"]
sampling_params = SamplingParams(temperature=0.8, top_p=0.95)
llm = LLM(model='...')
model = llm.llm_engine.model_executor.driver_worker.worker.model_runner.get_model()
+# 开启数据dump, 指定采集推理模型逐字符循环推理中的第1~3次
+debugger.start(model=model, token_range=[1, 3])
# 推理模型生成的逻辑
output = llm.generate(prompts, sampling_params=sampling_params)
+# 关闭数据dump并落盘
+debugger.stop()
+debugger.step()
输出说明
完成精度数据采集后,将打印dump数据文件生成路径dump_path,如下所示:
dump.json is at ./dump_path/step*
*表示step的编号,当打印的step编号为最后一个step时,表示dump结束。每个step目录下会保存dump数据文件。
dump结果文件介绍
dump目录说明
训练结束后,工具将dump的数据保存在dump_path参数指定的目录下。 目录结构示例如下:
单击展开目录结构
├── dump_path
│ ├── step0
│ | ├── rank0
│ | │ ├── dump_tensor_data
| | | | ├── Tensor.permute.1.forward.pt
| | | | ├── Functional.linear.5.backward.output.pt # 命名格式为{api_type}.{api_name}.{API调用次数}.{forward/backward}.{input/output}.{参数序号}, 其中,“参数序号”表示该API的第n个输入或输出,例如1,则为第一个参数,若该参数为list格式,则根据list继续排序,例如1.1,表示该API的第1个参数的第1个元素。
| | | | ...
| | | | ├── Module.conv1.Conv2d.forward.0.input.0.pt # 命名格式为{Module}.{module_name}.{class_name}.{forward/backward}.{调用次数}.{input/output}.{参数序号}, 其中,“参数序号”表示该Module的第n个参数,例如1,则为第一个参数,若该参数为list格式,则根据list继续排序,例如1.1,表示该Module的第1个参数的第1个元素。
| | | | ├── Module.conv1.Conv2d.forward.0.parameters.bias.pt # 模块参数数据:命名格式为{Module}.{module_name}.{class_name}.forward.{调用次数}.parameters.{parameter_name}。
| | | | └── Module.conv1.Conv2d.parameters_grad.0.weight.pt # 模块参数梯度数据:命名格式为{Module}.{module_name}.{class_name}.parameters_grad.{参数的grad_fn触发次数}.{parameter_name},其中,参数梯度中的计数是grad_fn触发次数,不是模块的调用次数。
| | | | # 当dump时传入的model参数为List[torch.nn.Module]或Tuple[torch.nn.Module]时,模块级数据的命名中包含该模块在列表中的索引index,命名格式为{Module}.{index}.*,*表示以上三种模块级数据的命名格式,例如:Module.0.conv1.Conv2d.forward.0.input.0.pt。
│ | | ├── dump.json
│ | | ├── stack.json
│ | | ├── dump_error_info.log
│ | | └── construct.json
│ | ├── rank1
| | | ├── dump_tensor_data
| | | | └── ...
│ | | ├── dump.json
│ | | ├── stack.json
│ | | ├── dump_error_info.log
| | | └── construct.json
│ | ├── ...
│ | |
| | └── rank7
│ ├── step1
│ | ├── ...
│ ├── step2
rank:设备ID,每张卡的数据保存在对应的rank{ID}目录下。当训练进程无法获取到rank信息时,当前进程的数据保存在proc{pid},pid为进程ID,proc的详细介绍如下:①在非分布式场景下,如单进程训练或单卡训练中,训练进程没有
rank信息,此时数据保存在proc{pid},比对、分级可视化和溢出检测功能支持该目录下的数据解析。②在大模型训练过程中,可能既存在
rank目录又存在proc目录,原因是一些进程可能仅在CPU上完成一些数据预处理操作,没有rank信息,此时目录名称为proc{pid},这部分数据一般不存在精度问题,比对、分级可视化和溢出检测等功能将不会支持该目录下的数据解析。
dump_tensor_data:保存采集到的张量数据。dump.json:保存API或Module前反向数据的统计量信息。包含dump数据的API名称或Module名称,各数据的dtype、shape、max、min、mean、L2norm(L2范数,平方根)统计信息,以及根据summary_mode配置输出的校验值(md5对应CRC-32字段md5,xor对应XOR校验字段md5)。具体介绍可参考dump.json文件说明。当Tensor的数据格式为NZ格式时,dump.json中max、min、mean、L2norm(L2范数,平方根)统计信息均为
null。且仅当Tensor的数据类型为torch.float32、torch.float16、torch.bfloat16中的一种时,才会计算mean、L2norm统计信息,其它数据类型仅计算max、min统计信息。当
summary_mode配置为xor时,dump.json仅输出XOR校验值,不输出max、min、mean、L2norm统计信息。加速算子不可用时自动回退到通用实现。当task配置为
"nan_check"时,dump.json中各API数据将包含is_nan字段,取值为0或1,0代表无溢出状态,1代表有溢出状态(该模式下不保存API中数据的统计值)。
dump_error_info.log:仅在dump工具报错时生成此记录日志,用于记录dump错误日志。stack.json:API/Module的调用栈信息。construct.json:分层分级结构,level为L1时,construct.json内容为空。
dump过程中,pt文件在对应算子或者模块被执行后就落盘,而json文件则需要在正常执行PrecisionDebugger.stop() 后才会写入完整数据,异常的程序终止会保存终止前被执行算子的相关pt文件,可能会导致json文件中数据丢失。
pt文件保存的前缀和PyTorch对应关系如下:
前缀 |
Torch模块 |
|---|---|
Tensor |
torch.Tensor |
Torch |
torch |
Functional |
torch.nn.functional |
NPU |
NPU亲和算子 |
VF |
torch._VF |
Aten |
torch.ops.aten |
Distributed |
torch.distributed |
MindSpeed |
mindspeed.ops |
Triton |
triton |
dump.json文件说明
L0级别
L0级别的dump.json文件包括模块的前反向的输入输出,以及模块的参数和参数梯度。以PyTorch的Conv2d模块为例,网络中模块调用代码为:
output = self.conv2(input) # self.conv2 = torch.nn.Conv2d(64, 128, 5, padding=2, bias=True)
dump.json文件中包含以下数据名称:
Module.conv2.Conv2d.forward.0:模块的前向数据,其中input_args为模块的输入数据(位置参数),input_kwargs为模块的输入数据(关键字参数),output为模块的输出数据,parameters为模块的参数数据,包括权重(weight)和偏置(bias)。Module.conv2.Conv2d.parameters_grad.0:模块的参数梯度数据,包括权重(weight)和偏置(bias)的梯度。Module.conv2.Conv2d.backward.0:模块的反向数据,其中input为模块反向的输入梯度(对应前向输出的梯度),output为模块的反向输出梯度(对应前向输入的梯度)。
说明:当dump时传入的model参数为List[torch.nn.Module]或Tuple[torch.nn.Module]
时,模块级数据的命名中包含该模块在列表中的索引index,命名格式为{Module}.{index}.*,*
表示以上三种模块级数据的命名格式,例如:Module.0.conv1.Conv2d.forward.0。
dump.json文件如下:
单击展开dump.json文件
{
"task": "tensor",
"level": "L0",
"framework": "pytorch",
"dump_data_dir": "/dump/path",
"data": {
"Module.conv2.Conv2d.forward.0": {
"input_args": [
{
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
8,
16,
14,
14
],
"Max": 1.638758659362793,
"Min": 0.0,
"Mean": 0.2544615864753723,
"Norm": 70.50277709960938,
"requires_grad": true,
"data_name": "Module.conv2.Conv2d.forward.0.input.0.pt"
}
],
"input_kwargs": {},
"output": [
{
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
8,
32,
10,
10
],
"Max": 1.6815717220306396,
"Min": -1.5120246410369873,
"Mean": -0.025344856083393097,
"Norm": 149.65576171875,
"requires_grad": true,
"data_name": "Module.conv2.Conv2d.forward.0.output.0.pt"
}
],
"parameters": {
"weight": {
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
32,
16,
5,
5
],
"Max": 0.05992485210299492,
"Min": -0.05999220535159111,
"Mean": -0.0006165213999338448,
"Norm": 3.421217441558838,
"requires_grad": true,
"data_name": "Module.conv2.Conv2d.forward.0.parameters.weight.pt"
},
"bias": {
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
32
],
"Max": 0.05744686722755432,
"Min": -0.04894155263900757,
"Mean": 0.006410328671336174,
"Norm": 0.17263513803482056,
"requires_grad": true,
"data_name": "Module.conv2.Conv2d.forward.0.parameters.bias.pt"
}
}
},
"Module.conv2.Conv2d.parameters_grad.0": {
"weight": [
{
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
32,
16,
5,
5
],
"Max": 0.018550323322415352,
"Min": -0.008627401664853096,
"Mean": 0.0006675920449197292,
"Norm": 0.26084786653518677,
"requires_grad": false,
"data_name": "Module.conv2.Conv2d.parameters_grad.0.weight.pt"
}
],
"bias": [
{
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
32
],
"Max": 0.014914230443537235,
"Min": -0.006656786892563105,
"Mean": 0.002657240955159068,
"Norm": 0.029451673850417137,
"requires_grad": false,
"data_name": "Module.conv2.Conv2d.parameters_grad.0.bias.pt"
}
]
},
"Module.conv2.Conv2d.backward.0": {
"input": [
{
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
8,
32,
10,
10
],
"Max": 0.0015069986693561077,
"Min": -0.001139344065450132,
"Mean": 3.3215508210560074e-06,
"Norm": 0.020567523315548897,
"requires_grad": false,
"data_name": "Module.conv2.Conv2d.backward.0.input.0.pt"
}
],
"output": [
{
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
8,
16,
14,
14
],
"Max": 0.0007466732058674097,
"Min": -0.00044813455315306783,
"Mean": 6.814070275140693e-06,
"Norm": 0.01474067009985447,
"requires_grad": false,
"data_name": "Module.conv2.Conv2d.backward.0.output.0.pt"
}
]
}
}
}
L1级别
L1级别的dump.json文件包括API的前反向的输入输出。以PyTorch的relu函数为例,网络中API调用代码为:
output = torch.nn.functional.relu(input)
dump.json文件中包含以下数据名称:
Functional.relu.0.forward:API的前向数据,其中input_args为API的输入数据(位置参数),input_kwargs为API的输入数据(关键字参数),output为API的输出数据。Functional.relu.0.backward:API的反向数据,其中input为API的反向输入梯度(对应前向输出的梯度),output为API的反向输出梯度(对应前向输入的梯度)。
dump.json文件如下:
单击展开dump.json文件
{
"task": "tensor",
"level": "L1",
"framework": "pytorch",
"dump_data_dir": "/dump/path",
"data": {
"Functional.relu.0.forward": {
"input_args": [
{
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
32,
16,
28,
28
],
"Max": 1.3864083290100098,
"Min": -1.3364859819412231,
"Mean": 0.03711778670549393,
"Norm": 236.20692443847656,
"requires_grad": true,
"data_name": "Functional.relu.0.forward.input.0.pt"
}
],
"input_kwargs": {},
"output": [
{
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
32,
16,
28,
28
],
"Max": 1.3864083290100098,
"Min": 0.0,
"Mean": 0.16849493980407715,
"Norm": 175.23345947265625,
"requires_grad": true,
"data_name": "Functional.relu.0.forward.output.0.pt"
}
]
},
"Functional.relu.0.backward": {
"input": [
{
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
32,
16,
28,
28
],
"Max": 0.0001815402356442064,
"Min": -0.00013352684618439525,
"Mean": 0.00011915402356442064,
"Norm": 0.007598237134516239,
"requires_grad": false,
"data_name": "Functional.relu.0.backward.input.0.pt"
}
],
"output": [
{
"type": "torch.Tensor",
"dtype": "torch.float32",
"shape": [
32,
16,
28,
28
],
"Max": 0.0001815402356442064,
"Min": -0.00012117840378778055,
"Mean": 2.0098118724831693e-08,
"Norm": 0.006532244384288788,
"requires_grad": false,
"data_name": "Functional.relu.0.backward.output.0.pt"
}
]
}
}
}
mix级别
mix级别的dump.json文件同时包括L0和L1级别的dump数据,文件格式与上述示例相同。
扩展功能
API输入输出过滤
功能说明
msProbe 提供固定的 API 支持列表,具体可参见 support_wrap_ops.yaml 文件。若不需要采集这些 API 的部分输入或输出,可在 builtin_ignore_ops.yaml 文件中配置内置忽略规则。
命中忽略规则后,工具会保留 API 调用记录,但屏蔽该 API 的输入或输出,对应位置会在 dump 结果中置为Null。该功能通常用于通信算子的接收缓冲区、原地写入类输出等不需要参与精度比对的参数。
若目标是完全不采集某个 API,请修改support_wrap_ops.yaml;若目标是保留 API 调用记录,但屏蔽其中部分输入或输出,请修改builtin_ignore_ops.yaml。
注意事项
当前仅支持配置 API forward 调用的输入或输出忽略规则,不支持配置 API backward。这里的 API forward 调用指 API 的 forward 方法调用,不等同于训练脚本中的 forward 阶段。
配置格式
{一级键}:
{二级键}:
input: [{input1}, {input2}...]
output: [{output1}, {output2}...]
字段说明
字段 |
说明 |
|---|---|
一级键 |
顶层分类,填写冒号前的分类名称。该字段使用 dump 结果中的 API 前缀,大小写需保持一致。具体可选择的顶层分类请参见顶层分类对应关系表。 |
二级键 |
API 名称,填写去掉顶层分类后的 API 名称。例如 dump 结果中为 |
|
需要忽略的 API forward 输入。列表中的整数表示位置参数下标,字符串表示关键字参数名;也可配置为 |
|
需要忽略的 API forward 输出。列表中的整数表示输出下标;也可配置为 |
support_wrap_ops.yaml |
builtin_ignore_ops.yaml |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
配置示例
以torch.distributed.recv(tensor, src=None, group=None, tag=0)为例,若需要忽略第 0 个输入参数tensor,配置如下:
Distributed:
recv:
input: [0]
以torch.distributed.isend(tensor, dst=None, group=None, tag=0)为例,若需要忽略全部输出,配置如下:
Distributed:
isend:
output: all
以torch_npu.npu_fusion_attention为例,若需要忽略第 4、5 个输出,配置如下:
NPU:
npu_fusion_attention:
output: [4, 5]
修改该文件后需重新启动训练或推理进程,使配置重新加载。
采集随机性API
功能说明
通过random_save接口,实现寻找模型脚本中所有随机性API的调用位置,并将结果输出到csv表格,帮助用户快速定位模型中的随机数生成点。
使用示例
import torch
import torch.nn as nn
import torch.nn.functional as F
+# 导入工具寻找随机性API的接口,网络中的随机性API会被保存在output路径下。
+from msprobe.pytorch import random_save
+random_save(output_path="./output")
# 定义网络
class ModuleOP(nn.Module):
def __init__(self) -> None:
super().__init__()
self.linear = nn.Linear(in_features=8, out_features=4)
def forward(self, x):
x1 = self.linear(x)
r1 = F.relu(x1)
return r1
if __name__ == "__main__":
model = ModuleOP()
x = torch.randn(10, 8)
out = model(x)
loss = out.sum()
loss.backward()
输出说明
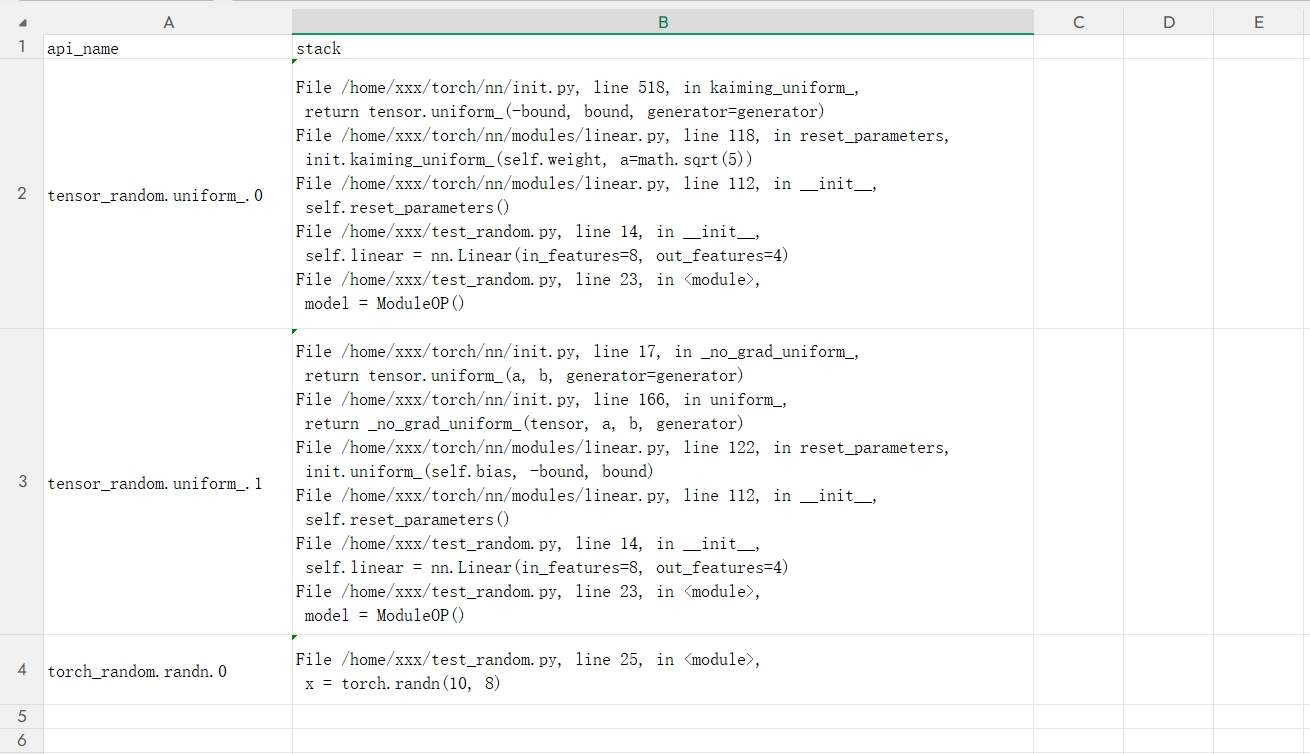
模型脚本执行完成后,在指定的output_path路径下生成csv文件,若执行的进程能获取到rank信息,则结果文件名称为random_rank{id}_{timestamp}.csv,否则为random_proc{pid}_{timestamp}.csv。
csv结果文件内容介绍如下:
参数 |
说明 |
|---|---|
api_name |
模型脚本中随机性API的名称。 |
stack |
随机性API对应的堆栈信息。 |
批量注册用户自定义的API
功能说明
除了在代码中逐个调用register_custom_api接口注册外,工具还支持通过YAML配置文件的方式批量自动注册自定义API,适用于需要注册大量自定义算子的场景。
注意事项
在msprobe工具安装目录下的pytorch/dump/api_dump/目录中修改custom_wrap_ops.yaml文件,请勿修改文件名。修改该文件后需重新启动训练或推理进程,使配置重新加载。
配置格式
<模块路径>:
- <API名称1>
- <API名称2>
字段说明
字段 |
说明 |
|---|---|
模块路径 |
API所属的Python模块路径,支持多级子模块,例如 |
API名称 |
模块中需要注册的API属性名,例如 |
配置示例
# 注册主函数中的API
__main__:
- add_and_mul
例如:
import torch def add_and_mul(a, b, c): """计算 (a + b) * c""" return (a + b) * c # 在此使能工具后,默认 dump 已经注册 add_and_mul
接口介绍
PrecisionDebugger
功能说明
通过加载dump配置文件的方式来确定dump操作的详细配置。此接口的初始化需与采集目标在同一个进程中,否则将无法采集目标数据。
函数原型
debugger = PrecisionDebugger(config_path=None, task=None, dump_path=None, level=None, step=None)
参数说明
config_path:可选参数,str类型,指定dump配置文件路径,参数示例:“./config.json”。未配置该路径时,默认使用config.json 文件的默认配置,配置选项含义可见config.json介绍。
其他参数均在config.json文件中可配,详细配置可见config.json介绍。
此接口的参数均不是必要的(均不配置的情况下默认采集所有 rank 和 step 的 L1 级别的统计数据),且优先级高于config.json 文件中的配置,但可配置的参数相比config.json较少。
返回值说明
debugger是PrecisionDebugger类的实例对象,该实例对象提供start、stop和step等函数开启和结束数据采集的功能。
调用示例
请参见dump采集基础示例。
start
功能说明
启动精度数据采集。在模型初始化之后的位置添加。需要与stop和step等函数一起搭配使用。
函数原型
debugger.start(model=None, token_range=None, rank_id=None)
参数说明
model:指定需要采集Module级数据的模型,支持传入torch.nn.Module、list[torch.nn.Module]或Tuple[torch.nn.Module]类型,默认未配置。
level配置为"L0"、"mix"或token_range不为None时,必须在该接口中配置该参数。
对于复杂模型,如果仅需要监测一部分(如model.A,model.A extends torch.nn.Module),传入需要监测的部分(如model.A)即可。
注意:传入的当前层不会被dump,工具只会dump传入层的子层级。如传入了model.A,A本身不会被dump,而是会dumpA.x, A.x.xx等。
token_range:指定推理模型采集时的token循环始末范围,支持传入[int, int]类型,代表[start, end],范围包含边界,默认未配置。
rank_id: 指定自定义的rank ID,支持传入大于等于0的整数。默认未配置,则工具基于torch.distributed.get_rank接口获取rank ID; 配置此参数后,dump的结果中,rank文件夹名称中的{ID}将使用该参数所配置的值。
注意:通常情况下,用户无需手动配置rank_id参数,工具默认通过torch.distributed.get_rank接口(下面简称get_rank接口)可自动获取多卡多进程的唯一rank ID; 然而,在某些特殊场景下,get_rank接口可能无法正确获取唯一的rank ID。例如,在推理框架sglang的DP推理场景中,各DP worker之间是独立的分布式集群,导致get_rank接口返回重复的rank ID,进而引发dump结果中rank文件夹同名覆盖的问题,造成dump数据丢失。
针对此类特殊场景,可通过配置rank_id参数为rank文件夹命名,但需要保证rank_id在各个进程中唯一。该值通常可在模型脚本或训练推理框架中获取,例如推理框架sglang中的self.gpu_id,其在每个进程中均保持唯一性。
配置示例:
debugger.start(rank_id=self.gpu_id)
返回值说明
无
调用示例
请参见dump采集基础示例。
stop
功能说明
停止精度数据采集。在start接口之后的任意位置添加。
若stop函数添加在反向计算代码(如loss.backward)之后,则会采集start和该函数之间的前反向数据。
若stop函数添加在反向计算代码之前,则需要将step函数添加到反向计算代码之后,才能采集start 和该函数之间的前反向数据。
注意事项
stop函数必须调用,否则可能导致精度数据落盘不全。
函数原型
debugger.stop()
返回值说明
无
调用示例
请参见dump采集基础示例。
step
功能说明
结束一个step的数据采集,完成所有数据落盘并更新dump参数。在一个step结束的位置添加,且必须在stop函数之后的位置调用。
注意事项
该函数需要配合start和stop函数使用,尽量添加在反向计算代码(如loss.backward)之后,否则可能会导致反向数据丢失。
函数原型
debugger.step()
返回值说明
无
调用示例
请参见dump采集基础示例。
module_dump
功能说明 开启模块级精度数据dump。该接口为函数模块化接口,即只会dump输入的模块数据,不会dump子模块和模块内API的数据。
注意事项
该函数需要配合start、stop和step等接口使用。
函数原型
module_dump(module, module_name)
参数说明
module:网络中实例化好的nn.Module类对象。torch.nn.Module类型,必选。
module_name:用户自定义该module名称,主要用于dump数据的命名。str类型,必选。
返回值说明
无
调用示例
请参见采集函数模块化数据。
module_dump_end
功能说明
结束模块级精度数据dump。在module_dump和module_dump_end之间的API或者Module,除了传入的module,其他数据均不会被dump。 在执行完module_dump_end后数据恢复正常的dump模式。
函数原型
module_dump_end()
返回值说明
无
调用示例
请参见采集函数模块化数据。
save
功能说明
单点保存网络执行过程中前反向数值,并以统计值数据或张量文件落盘。
函数原型
save(variable, name, save_backward=True)
参数说明
参数名称 |
可选/必选 |
参数含义 |
|---|---|---|
variable |
必选 |
需要保存的变量,支持数据类型:dict, list, tuple, torch.tensor, int, float, str。 |
name |
必选 |
指定的名称,支持数据类型:str。 |
save_backward |
可选 |
是否保存反向数据,支持数据类型:boolean。 |
返回值说明
无
调用示例
请参见单点保存工具使用介绍。
set_init_step
功能说明
设置起始step数,step数默认从0开始计数,使用该接口后step从指定值开始计数。该函数需要写在训练迭代的循环开始前,不能写在循环内。
函数原型
debugger.set_init_step(step)
参数说明
step:指定的起始step数。
返回值说明
无
调用示例
无
register_custom_api
功能说明
注册用户自定义的API到工具用于API级数据dump。
函数原型
debugger.register_custom_api(module, api, api_prefix)
参数说明
以torch.matmul api为例
module:必选,API所属的包,即传入torch。
api:必选,API的名称,str类型,即传入"matmul"。
api_prefix:可选,dump.json中api名的前缀,默认为包名的字符串格式, 即"torch"。
返回值说明
无
调用示例
+# 需要导入自定义算子的模块
+import module_a
+from msprobe.pytorch import seed_all, PrecisionDebugger
+seed_all()
+debugger = PrecisionDebugger(config_path="./config.json")
+# 假设自定义算子的调用方式是module_a.compute(args),注册方式如下。
+debugger.register_custom_api(module = module_a, api = "compute")
# 模型、损失函数的定义及初始化等操作
# ...
# 数据集迭代的位置一般为模型训练开始的位置
for data, label in data_loader:
+ debugger.start(model) # 开启数据dump
# 如下是模型每个step执行的逻辑
output = model(data)
# ...
# 计算梯度
loss.backward()
# 更新参数
optimizer.step()
+ debugger.stop() # 关闭数据dump,可继续开启数据dump,采集数据会记录在同一个step中
+ debugger.step() # 结束数据dump,若继续开启数据dump,采集数据将记录在下一个step中
+# 取消该API的dump,根据实际情况按需使用。
+debugger.restore_custom_api(module_a, "compute")
restore_custom_api
功能说明
恢复用户原有的自定义的API,取消该API的dump。
函数原型
debugger.restore_custom_api(module, api)
参数说明
以torch.matmul api为例
module:必选,API所属的包,即传入torch。
api:必选,API的名称,str类型,即传入"matmul"。
返回值说明
无
调用示例
seed_all
功能说明
用于控制模型网络中的随机性,支持固定随机种子以及启用确定性计算,以确保实验的可复现性。
函数原型
seed_all(seed=1234, mode=False, rm_dropout=False, is_enhanced=False)
参数说明
seed:随机性种子。参数示例:seed=1000。默认为1234,非必选。
mode:确定性计算模式。可配置True或False。参数示例:mode=True。默认为False。非必选(注意:确定性计算会导致API执行性能降低,建议在发现模型多次执行结果不同的情况下开启)。
rm_dropout:控制dropout失效的开关。可配置True或False,默认为False,非必选。参数示例:rm_dropout=True。 该参数设置为True后,工具会自动将
torch.nn.functional.dropout、torch.nn.functional.dropout2d、torch.nn.functional.dropout3d、torch.nn.Dropout、torch.nn.Dropout2d、torch.nn.Dropout3d的接口参数p置为0,以避免因随机dropout造成的网络随机性。注意:通过rm_dropout控制dropout失效需要在初始化dropout实例前调用才能生效。is_enhanced:增强随机性固定的开关。可配置True或False,默认为False,非必选。参数示例:is_enhanced=True。开启该功能后,将进一步固定PyTorch、NumPy以及Python内置随机数生成器的状态。在同一个进程或不同进程中多次执行相同的随机性API,每次生成的随机值都完全相同。这有助于在更复杂的随机场景下实现严格的可复现性。
返回值说明
无
调用示例
import torch
+from msprobe.pytorch import seed_all
# seed_all仅固定随机种子和开启确定性计算。
+seed_all(seed=1234, mode=True)
num1 = torch.mean(torch.randn(2,2))
print(num1) # tensor(-0.0866)
num2 = torch.mean(torch.randn(2,2))
print(num2) # tensor(0.2038)
上述脚本重复执行多次,每次执行结果num1和num2是能对应的,但该脚本内执行两次相同的随机性API,生成的结果是不一样的,即num1不等于num2。
import torch
+from msprobe.pytorch import seed_all
# seed_all固定随机种子和开启确定性计算,并开启随机数固定增强功能。
+seed_all(seed=1234, mode=True, is_enhanced=True)
num1 = torch.mean(torch.randn(2,2))
print(num1) # tensor(-0.0866)
num2 = torch.mean(torch.randn(2,2))
print(num2) # tensor(-0.0866)
上述脚本中执行两次相同的随机性API,生成的结果能完全相同,即使该脚本多次重复执行也能确保两个值完全相同。
其他说明
当前工具dump功能默认不会固定随机性,若希望每次采集的数据保持一致,建议在dump数据前调用seed_all接口。
seed_all函数可固定随机数的范围如下表:
API |
固定随机数 |
|---|---|
os.environ[‘PYTHONHASHSEED’] = str(seed) |
禁止Python中的hash随机化 |
os.environ[‘HCCL_DETERMINISTIC’] = True |
固定通信算子计算的确定性 |
np.random.seed(seed) |
设置numpy中随机生成器的种子 |
torch.manual_seed(seed) |
设置当前CPU的随机种子 |
torch.cuda.manual_seed(seed) |
设置当前GPU的随机种子 |
torch.cuda.manual_seed_all(seed) |
设置所有GPU的随机种子 |
torch_npu.npu.manual_seed(seed) |
设置当前NPU的随机种子 |
torch_npu.npu.manual_seed_all(seed) |
设置所有NPU的随机种子 |
torch.use_deterministic_algorithms(True) |
CUDA/CANN使能确定性计算(注意mode为True时才会调用该方法开启确定性) |
torch.backends.cudnn.enable=False |
关闭cuDNN |
torch.backends.cudnn.benchmark=False |
cuDNN确定性地选择算法 |
torch.backends.cudnn.deterministic=True |
cuDNN仅使用确定性的卷积算法 |
torch.nn.functional.dropout |
将dropout的接口参数p置为0 |
torch.nn.functional.dropout2d |
将dropout2d的接口参数p置为0 |
torch.nn.functional.dropout3d |
将dropout3d的接口参数p置为0 |
torch.nn.Dropout |
将Dropout的接口参数p置为0 |
torch.nn.Dropout2d |
将Dropout2d的接口参数p置为0 |
torch.nn.Dropout3d |
将Dropout3d的接口参数p置为0 |
需要保证CPU或GPU以及NPU的模型输入完全一致,dump数据的比对才有意义,seed_all并不能保证模型输入完全一致,如下表所示场景需要保证输入的一致性。
场景 |
固定方法 |
|---|---|
数据集的shuffle |
关闭shuffle。 |
关闭shuffle示例如下:
train_loader = torch.utils.data.DataLoader(
train_dataset,
batch_size=batch_size,
shuffle=False,
num_workers=num_workers
)
random_save
功能说明
寻找模型脚本中所有随机性API的调用位置,并将结果输出到csv表格,帮助用户快速定位模型中的随机数生成点。
函数原型
random_save(output_path="./output")
参数说明
output_path:指定随机性API的保存路径。可选参数,str类型,默认值为"./output",即默认保存在当前路径的output目录下。参数示例:output_path=“./output”。
返回值说明
无
调用示例
请参见采集随机性API。
补充说明
dump "statistics"模式的性能膨胀大小与"tensor"模式采集的数据量大小,可以参考dump基线。